附件1:理论课程教学大纲模板
《智能驾驶环境感知技术》课程教学大纲
(Environment Perception Technology for Intelligent Drive) ������ ������ ������ ������ ������ ������ ������ ������ ������ ������ ������ ������ ������
编写单位: 汽车与机械工程 学院 汽车工程系 系(教研室)
编写时间:2024年9月
《智能驾驶环境感知技术》课程教学大纲
一、基本信息
课程名称: 智能驾驶环境感知技术
英文名称:Environment Perception Technology for Intelligent Drive
课程类别:(通识教育课程、学科基础教育课程、专业教育课程)
课程性质:选修课
课程编码:0802000290
学分:2
总学时:32。讲授32学时,实验0学时,上机0学时,实训0学时
适用专业:车辆工程
先修课程与知识储备: 车联网技术及应用、汽车电控单元与接口技术、汽车电子技术、汽车理论、汽车构造、汽车设计等课程及传感器、控制算法等相关基础知识。
后继课程:毕业设计
二、课程简介
本课程是车辆工程专业本科学生专业课程,选修课。通过本课程的学习,帮助学生了解智能驾驶环境感知的各项关键技术,理解并掌握在日益成熟的智能化技术下汽车智能驾驶的设计和实现方式,其目的在于培养学生获取和综合运用智能驾驶环境感知技术的能力,为达到能够解决复杂车辆工程问题,开发、选择与使用恰当的技术、资源、现代工程工具和信息技术工具,包括对复杂车辆工程问题的预测与模拟,并能够理解其局限性的目的奠定基础。
三、教学目标
1、课程思政教学目标:通过本课程学习,引导学生树立正确的消费观念,建立保护环境而不断调整自身经济活动和社会行为,协调人与环境、人与自然互相关系的实践活动的自觉性;深刻认识违法通行、交通秩序混乱是影响通行效率、交通拥堵,危害交通安全、导致交通事故的直接原因,树立交通法规和安全意识;同时培养学生团队意识,合作共赢精神。
2、课程教学总目标:培养学生能根据智能驾驶汽车组成和结构原理与各种环境感知传感器的特性以及设计要求选择与运用合适的智能驾驶环境感知传感器,并能正确运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟,同时能对智能驾驶环境感知技术的应用方案进行正确评估分析,能应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化,使学生能够针对复杂车辆工程问题,开发、选择与使用恰当的技术、资源、现代工程工具和信息技术工具,包括对复杂车辆工程问题的预测与模拟,并能够理解其局限性的能力是本课程总教学目标。
3、课程目标与学生能力和素质培养的关系:本课程目标根据支撑的毕业要求指标点,并结合课程实际情况,细化形成了4条课程目标(具体见表1)。采用Bloom法则认知领域教育目标的至少第3级动词引导,将课程目标反映的能力与素质要求转变为可观察、可测量的学生行为表现。
4、毕业要求—课程目标关系(OBE结果导向)
按照2023培养方案中的毕业要求,考虑本课程与专业毕业要求的支撑关系,制定本课程学习目标如表1所示:
表1毕业要求-课程目标关系表
毕业要求 | 指标点 | 与课程关联度 | 课程目标 |
5. 使用现代工具:能够针对复杂车辆工程问题,开发、选择与使用恰当的技术、资源、现代工程工具和信息技术工具,包括对复杂车辆工程问题的预测与模拟,并能够理解其局限性。 | 5.1了解车辆工程专业常用的现代信息技术工具、方法、工程工具与管理系统,熟悉其使用原理和方法。 | H | 目标1:能描述智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,并能根据设计要求选择与运用合适的环境感知传感器。 |
5.2能够选择和使用现代工程工具,对汽车设计、制造等复杂工程问题进行分析、计算与设计。 | H | 目标2:能正确运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟。 | |
5.3能够针对车辆工程中复杂工程问题,开发或选用满足特定需求的现代工具,管理和优化,并分析其局限性。 | H | 目标3:能对智能驾驶环境感知技术的应用方案进行正确评估分析,能应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化。 | |
7. 环境与可持续发展:能够理解和评价针对复杂车辆工程问题的专业工程实践对环境、社会可持续发展的影响。 | 7.1了解环境保护和可持续发展的政策和法规,建立环保和可持续发展的理念。 | M | 目标4:能正对智能车辆环境感知技术为环境和可持续发展带来的正面效果有正确的认知,能初步具备各类型感知传感器设计时需要考虑的环保和可持续的观念。 |
7.2能够理解并评价本专业工程实践对环境的影响,在流程设计、产品开发及工程实践中考虑到环境保护和可持续发展的要求。 | M | 目标5:能正确分析、评价智能驾驶环境感知技术应用对环境、社会可持续发展的影响。 |
四、课程内容及学时分配
本课程内容、建议学时以及知识单元与课程目标支撑关系如表2所示。
表2课程内容及学时分配
知识单元 | 知识点 | 讲授学时 | 实验学时 | 上机学时 | 课程目标 | ||
序号 | 描述 | 序号 | 描述 | ||||
1 | 绪论:智能驾驶环境感知技术 | 1 | 智能汽车概念 | 2 | 0 | 0 | 1、4 |
2 | 智能汽车分级 | ||||||
3 | 智能网联汽车关键技术 | ||||||
4 | 无人驾驶汽车事故分析与启示 | ||||||
5 | 智能驾驶汽车传感器的布设 | ||||||
6 | 智能驾驶汽车传感器系统的发展 | ||||||
7 | 思政案例1:能源危机、环保意识 | ||||||
2 | 超声波雷达的原理及应用 | 1 | 超声波的概念 | 2 | 0 | 0 | 1、2、4 |
2 | 超声波雷达的原理 | ||||||
3 | 超声波雷达测距系统的设计 | ||||||
4 | 改进型超声波雷达测距系统的设计 | ||||||
5 | 超声波雷达在智能车上的应用 | ||||||
3 | 毫米波雷达的原理及应用 | 1 | 毫米波的概念 | 2 | 0 | 0 | 1、2、4 |
2 | 毫米波雷达的结构及原理 | ||||||
3 | 毫米波雷达的特点及分类 | ||||||
4 | 毫米波雷达的技术参数 | ||||||
5 | 毫米波雷达的产品及应用 | ||||||
6 | 毫米波雷达的发展趋势 | ||||||
4 | 激光雷达的原理及应用 | 1 | 激光的概念 | 2 | 0 | 0 | 1、2、4 |
2 | 激光雷达的结构及原理 | ||||||
3 | 激光波雷达的特点及分类 | ||||||
4 | 激光雷达的技术参数 | ||||||
5 | 激光雷达的产品及应用 | ||||||
6 | 激光雷达的发展趋势 | ||||||
5 | 视觉传感器的原理及应用 | 1 | 视觉传感器的结构及原理 | 2 | 0 | 0 | 1、2、4 |
2 | 视觉传感器的特点及指标 | ||||||
3 | 数字图像处理 | ||||||
4 | 双目立体视觉 | ||||||
5 | 全景成像及红外成像 | ||||||
6 | 视觉传感器的产品及应用 | ||||||
6 | 智能驾驶导航定位 | 1 | 全球卫星导航系统 | 4 | 0 | 0 | 1、2、4 |
2 | 惯性导航传感器 | ||||||
3 | GPS与惯性导航传感器信息融合 | ||||||
4 | 智能驾驶导航定位系统发展趋势 | ||||||
7 | 智能驾驶高精地图 | 1 | 高精地图的概念 | 2 | 0 | 0 | 1、2、4 |
2 | 高精地图的作用 | ||||||
3 | 高精地图的构建 | ||||||
4 | 高精地图面临的问题与挑战 | ||||||
5 | 高德高精地图的发展 | ||||||
8 | 传感器的标定 | 1 | 传感器标定的目的与意义 | 2 | 0 | 0 | 1、2、3 |
2 | 视觉传感器的标定 | ||||||
3 | 激光雷达的标定 | ||||||
4 | 视觉传感器与激光雷达联合标定 | ||||||
9 | 多传感器数据融合 | 1 | 多传感器数据融合的提出及应用 | 4 | 0 | 0 | 1、2、3 |
2 | 多传感器数据融合的原理与定义 | ||||||
3 | 多传感器数据融合系统架构 | ||||||
4 | 多传感器数据融合算法 | ||||||
5 | 视觉传感器与激光雷达的融合 | ||||||
6 | 思政案例2:团队合作 | ||||||
10 | 视觉特征与深度学习 | 1 | 视觉特征 | 4 | 0 | 0 | 1、2 |
2 | 深度学习基础 | ||||||
3 | 卷积神经网络 | ||||||
11 | 环境感知与识别 | 1 | 车道线识别 | 4 | 0 | 0 | 1、2、3、4 |
2 | 车辆识别 | ||||||
3 | 交通标志识别 | ||||||
4 | 交通信号灯识别 | ||||||
5 | 行人识别 | ||||||
6 | 思政案例3:遵纪守法、安全教育 | ||||||
12 | 综合考查 | 1 | 考查学生课程目标掌握情况 | 2 |
|
| 1、2、3 |
| 总计 |
|
| 32 |
|
|
|
五、教学方法及要求(文字部分:1、教学方法要求,包括教师学科专业背景、教学准备、教学方式、教学组织和教学资料、教学手段等方面。2、课程思政教学方法及要求。)
教师专业背景:本专业教师廖家才,博士毕业于湖南大学机械与运载工程学院机械工程,博士期间研究方向为智能车辆环境感知,从事了视觉、雷达、超声波等传感器的感知算法研究,并发表了相关的论文,具备专业的技术知识。
教学准备包括以下几个方面:
1. 确定教学目标:根据课程大纲和教学内容,确定教学目标和教学重点。
2. 准备教学内容:准备教学材料和教学资源,包括教材、课件、教具等。
3. 熟悉教学环境:教师需要布置教学环境,包括教室、实验室、实训基地等,以符合教学需要。
4. 准备教学设备:教师需要准备教学设备,包括多麦克风、话筒、激光笔等。
5. 准备学生管理:打印考勤表,提前制定学生管理规定,包括考勤制度、作业要求、考试安排等。
6. 准备教学资源:准备本门专业学科教学资源,包括图书资料、网络资源等。
教学方式:
1. 传统的教学方式:通过讲解知识,讲述理论知识。
2. 互动性教学方式:通过提问引导学生思考,增强师生互动,提高学生学习兴趣。
3. 实践性教学方式:通过实践活动锻炼学生实践能力,加深对知识的理解。
4. 开放式教学方式:通过开放式探究,引导学生主动探究、思考、寻找答案。
不同的教学方式都有其优点和局限性,需要根据教学目标和实际情况选择合适的教学方式,以提高教学质量和效果。
教学组织:本课程课堂教学流程如图1所示。探究学生深度参与的混合式教学模式。基于雨课堂,采用学生课前、课中、课后及考前、考后的课程深度参与的策略,建立学生课程参与度的评价措施;课前通过雨课堂推送预习资料和预习任务,课中采用雨课堂进行深度互动启发式教学和案例实践教学,课后推送开放式的测试检验题,以及对本次课的测评调查表;考前基于雨课堂推送复习资料、讨论答疑,考后进行课程教学评价与反馈;激励、激发学生自觉自主学习,促进学生深层次学习,提高学生的学习效果,提升课程对专业培养目标和毕业要求的支撑度。
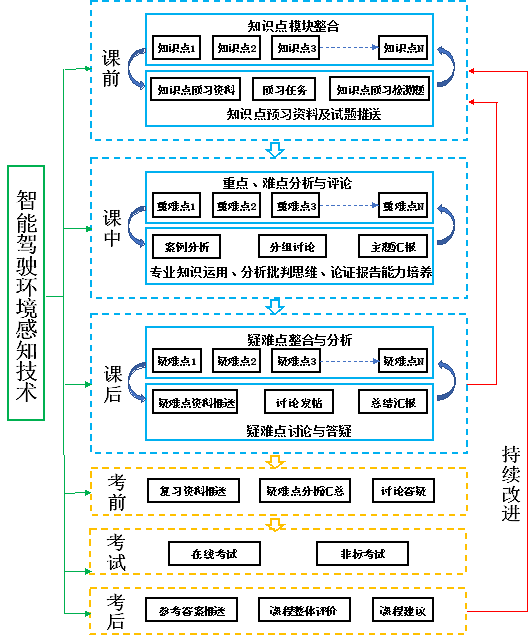
图1 课堂教学流程
六、重点与难点
1、重点内容:①智能驾驶环境感知技术的系统构成与原理;
②智能驾驶环境感知技术实现的各种算法原理。
2、难点内容:①智能驾驶环境感知技术系统的设计;
②智能驾驶环境感知技术环境感知技术的应用。
七、学习要求(文字部分:对学生学习进行要求约定。如:完成教师布置的预习要求、参与课堂讨论的要求、作业要求、课外自主学习要求、考试要求等等。教师可根据课程特点和教学要求具体设计)
1、积极上课,不得无故缺课;
2、按时完成任课教师在雨课堂布置的学习任务点;
3、积极参与课堂讨论与仿真设计;高质量完成并按时提交作业。
八、考核内容及考核方式
1、考核内容及评价依据
本课程考核内容、建议评价依据以及与课程目标对应关系如表3所示。
表3 课程目标-考核方式关系表
课程目标 | 考核内容 | 评价依据及成绩比例(%) | 成绩比例(%) | |||
课堂学习 | 阶段测试 | 仿真设计 | 期末考试 | |||
目标1:能描述智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,并能根据设计要求选择与运用合适的环境感知传感器。 | 以课堂学习、文献综述、仿真设计、期末考试等形式,考察学生能“正确描述智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,并能根据设计要求选择与运用合适的环境感知传感器”的能力。 | 8 | 4 | 3 | 25 | 40 |
目标2:能正确运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟。 | 以课堂学习、仿真设计、期末考试等形式,考察学生“正确运用相关软件工具对智能驾驶环境感知传感器性能及识别目标进行模拟”的能力。 | 5 |
| 5 | 10 | 20 |
目标3:能对智能驾驶环境感知技术的应用方案进行正确评估分析,能应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化。 | 以课堂学习、文献综述、仿真设计、期末考试等形式,考察学生“对智能驾驶环境感知技术的应用方案正确评估分析,应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化”的能力。 | 2 | 3 | 5 | 25 | 35 |
目标4:能正确分析、评价智能驾驶环境感知技术应用对环境、社会可持续发展的影响。 | 以文献综述、仿真设计等形式,考察学生“智能驾驶环境感知技术应用对环境、社会可持续发展影响的评估分析”能力。 |
| 3 | 2 |
| 5 |
合计 | 15 | 10 | 15 | 60 | 100 | |
2、成绩评定
(1)课程目标与评分标准之间的对应关系
表4 课程目标-成绩评定标准关系表
表4-1 评分标准
评价标准等级与内容 | |||||
100~90——优 | 89~80——良 | 79~70——中 | 69~60—及格 | 59~0—不及格 | |
目标1:能描述智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,并能根据设计要求选择与运用合适的环境感知传感器。 | 解答老师针对智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,环境感知传感器选择等设计的问题,错误在10%以下 | 解答老师针对智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,环境感知传感器选择等设计的问题,错误在11%-20% | 解答老师针对智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,环境感知传感器选择等设计的问题,错误在21%-30 | 解答老师针对智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,环境感知传感器选择等设计的问题,错误在31%-40% | 解答老师针对智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,环境感知传感器选择等设计的问题,存在40%以上的错误 |
目标2:能正确运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟。 | 解答老师针对运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟设计的问题,错误在10%以下 | 解答老师针对运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟设计的问题,错误在11%-20% | 解答老师针对运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟设计的问题,错误在21%-30 | 解答老师针对运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟设计的问题,错误在31%-40% | 解答老师针对运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟设计的问题,存在40%以上的错误 |
目标3:能对智能驾驶环境感知技术的应用方案进行正确评估分析,能应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化。 | 解答老师针对智能驾驶环境感知技术的应用方案进行评估分析,应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化等设计的问题,错误在10%以下 | 解答老师针对智能驾驶环境感知技术的应用方案进行评估分析,应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化等设计的问题,错误在11%-20% | 解答老师针对智能驾驶环境感知技术的应用方案进行评估分析,应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化等设计的问题,错误在21%-30 | 解答老师针对智能驾驶环境感知技术的应用方案进行评估分析,应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化等设计的问题,错误在31%-40% | 解答老师针对智能驾驶环境感知技术的应用方案进行评估分析,应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化等设计的问题,存在40%以上的错误 |
表4-2 文献综述评分标准
课程目标 | 评价标准等级与内容 | ||||
100~90——优 | 89~80——良 | 79~70——中 | 69~60—及格 | 59~0—不及格 | |
目标1:能描述智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,并能根据设计要求选择与运用合适的环境感知传感器。 | 文献准确清晰地综述了“智能驾驶汽车、环境感知传感器的研究现状、发展趋势以及应用情况”。 | 文献较准确清晰地综述了“智能驾驶汽车、环境感知传感器的研究现状、发展趋势以及应用情况”,但存在极少量错误。 | 文献较准确清晰地综述了“智能驾驶汽车、环境感知传感器的研究现状、发展趋势以及应用情况”,但存在少量错误。 | 文献基本准确清晰地综述了“智能驾驶汽车、环境感知传感器的研究现状、发展趋势以及应用情况”,但存在一定错误。 | 文献不能准确清晰地综述了“智能驾驶汽车、环境感知传感器的研究现状、发展趋势以及应用情况”,且存在大量错误。 |
目标3:能对智能驾驶环境感知技术的应用方案进行正确评估分析,能应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化。 | 文献准确清晰地综述了“环境感知技术在智能/自动驾驶应用的相关技术方案,并对相关架构及技术进行了正确地对比评析”。 | 文献较准确清晰地综述了“环境感知技术在智能/自动驾驶应用的相关技术方案,并对相关架构及技术进行了正确地对比评析”,但存在极少量错误。 | 文献较准确清晰地综述了“环境感知技术在智能/自动驾驶应用的相关技术方案,并对相关架构及技术进行了正确地对比评析”,但存在少量错误。 | 文献基本准确清晰地综述了“环境感知技术在智能/自动驾驶应用的相关技术方案,并对相关架构及技术进行了正确地对比评析”,但存在一定错误。 | 文献不能准确清晰地综述了“环境感知技术在智能/自动驾驶应用的相关技术方案,并对相关架构及技术进行了正确地对比评析”,且存在大量错误。 |
目标4:能正确分析、评价智能驾驶环境感知技术应用对环境、社会可持续发展的影响。 | 文献准确清晰地综述了“智能驾驶环境感知技术相关应用对环境、社会可持续发展的影响”。 | 文献准确清晰地综述了“智能驾驶环境感知技术相关应用对环境、社会可持续发展的影响”,但存在极少量错误。 | 文献较准确清晰地综述了“智能驾驶环境感知技术相关应用对环境、社会可持续发展的影响”,但存在少量错误。 | 文献基本准确清晰地综述了“智能驾驶环境感知技术相关应用对环境、社会可持续发展的影响”,但存在一定错误。 | 文献没有准确清晰地综述了“智能驾驶环境感知技术相关应用对环境、社会可持续发展的影响”。 |
表4-3 仿真设计评分表标准
课程目标 | 评价标准等级与内容 | ||||
100~90——优 | 89~80——良 | 79~70——中 | 69~60—及格 | 59~0—不及格 | |
目标1:能描述智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,并能根据设计要求选择与运用合适的环境感知传感器。 | 仿真设计报告正确阐述了环境感知技术系统的结构及原理,并选择了合适的传感器。 | 仿真设计报告较正确地阐述了环境感知技术系统的结构及原理,并选择了合适的传感器,但存在极少量错误。 | 仿真设计报告较正确地阐述了环境感知技术系统的结构及原理,并选择了合适的传感器,但存在少量错误。 | 仿真设计报告基本正确阐述了环境感知技术系统的结构及原理,并选择了合适的传感器,但存在一定错误。 | 仿真设计报告不能正确阐述了环境感知技术系统的结构及原理,并选择了合适的传感器,且存在大量错误。 |
目标2:能正确运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟。 | 仿真设计正确运用了相关仿真软件或工具,能正确模拟环境感知传感器性能,并对目标进行正确识别。 | 仿真设计正确运用了相关仿真软件或工具,能较正确地模拟环境感知传感器性能,并对目标进行正确识别,但存在极少量错误。 | 仿真设计正确运用了相关仿真软件或工具,能较正确模拟环境感知传感器性能,并对目标进行正确识别,但存在少量错误。 | 仿真设计正确运用了相关仿真软件或工具,能基本正确模拟环境感知传感器性能,并对目标进行正确识别,但存在一定错误。 | 仿真设计不能正确运用相关仿真软件或工具,并不能正确模拟环境感知传感器性能,并对目标进行正确识别,且存在大量错误。 |
目标3:能对智能驾驶环境感知技术的应用方案进行正确评估分析,能应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化。 | 正确设计了结合环境感知技术的智能驾驶辅助系统,并正确运用了相关仿真软件或工具对关键性能及关键参数的影响进行了模拟分析。 | 正确设计了结合环境感知技术的智能驾驶辅助系统,并正确运用了相关仿真软件或工具对关键性能及关键参数的影响进行了模拟分析,但存在极少量错误。 | 较正确设计了结合环境感知技术的智能驾驶辅助系统,并正确运用了相关仿真软件或工具对关键性能及关键参数的影响进行了模拟分析,但存在少量错误。 | 基本正确设计了结合环境感知技术的智能驾驶辅助系统,并正确运用了相关仿真软件或工具对关键性能及关键参数的影响进行了模拟分析,但存在一定错误。 | 不能正确设计了结合环境感知技术的智能驾驶辅助系统,并不能正确运用了相关仿真软件或工具对关键性能及关键参数的影响进行了模拟分析,且存在大量错误。 |
目标4:能正确分析、评价智能驾驶环境感知技术应用对环境、社会可持续发展的影响。 | 仿真设计报告准确清晰地阐述了“智能驾驶环境感知技术相关应用对环境、社会可持续发展的影响”。 | 仿真设计报告准确清晰地阐述了“智能驾驶环境感知技术相关应用对环境、社会可持续发展的影响”,但存在极少量错误。 | 仿真设计报告较准确清晰地阐述了“智能驾驶环境感知技术相关应用对环境、社会可持续发展的影响”,但存在少量错误。 | 仿真设计报告基本准确清晰地阐述了“智能驾驶环境感知技术相关应用对环境、社会可持续发展的影响”,但存在一定错误。 | 仿真设计报告没有准确清晰地阐述了“智能驾驶环境感知技术相关应用对环境、社会可持续发展的影响”。 |
表4-4 期末考试评分标准
课程目标 | 评价标准等级与内容 | ||||
100~90——优 | 89~80——良 | 79~70——中 | 69~60—及格 | 59~0—不及格 | |
目标1:能描述智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,并能根据设计要求选择与运用合适的环境感知传感器。 | 正确解答针对智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,环境感知传感器选择等设计的问题,错误在10%以下 | 正确解答针对智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,环境感知传感器选择等设计的问题,错误在11%-20% | 正确解答针对智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,环境感知传感器选择等设计的问题,错误在21%-30 | 正确解答针对智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,环境感知传感器选择等设计的问题,错误在31%-40% | 正确解答针对智能驾驶汽车组成和结构原理以及各种环境感知传感器的特性,环境感知传感器选择等设计的问题,存在40%以上的错误 |
目标2:能正确运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟。 | 正确解答针对运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟设计的问题,错误在10%以下 | 正确解答针对运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟设计的问题,错误在11%-20% | 正确解答针对运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟设计的问题,错误在21%-30 | 正确解答针对运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟设计的问题,错误在31%-40% | 正确解答针对运用相关工具对智能驾驶环境感知传感器性能及识别目标进行模拟设计的问题,存在40%以上的错误 |
目标3:能对智能驾驶环境感知技术的应用方案进行正确评估分析,能应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化。 | 正确解答针对智能驾驶环境感知技术的应用方案进行评估分析,应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化等设计的问题,错误在10%以下 | 正确解答针对智能驾驶环境感知技术的应用方案进行评估分析,应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化等设计的问题,错误在11%-20% | 正确解答针对智能驾驶环境感知技术的应用方案进行评估分析,应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化等设计的问题,错误在21%-30 | 正确解答针对智能驾驶环境感知技术的应用方案进行评估分析,应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化等设计的问题,错误在31%-40% | 正确解答针对智能驾驶环境感知技术的应用方案进行评估分析,应用相关环境感知技术对汽车智能驾驶相关系统进行设计、模拟及优化等设计的问题,存在40%以上的错误 |
九、课程资源平台(专题网站、学校网络资源;实践性教学资源,课程思政资源)
1、专题网站:
① 自动驾驶集锦
https://blog.csdn.net/expert_joe/article/details/122710257
② 智能驾驶师资培训理论课程
https://www.bilibili.com/video/BV1qM4y1r7xk/?spm_id_from=333.337.search-card.all.click
2、实践性教学资源:
① 百度apollo自动驾驶在线课程:
https://apollo.baidu.com/community/online-course
② 自动驾驶系统入门:
https://zhuanlan.zhihu.com/p/79131539?utm_id=0
③ MIT深度学习与自动驾驶
https://www.bilibili.com/video/BV1qM4y1r7xk/?spm_id_from=333.337.search-card.all.click
④ python Self-Driving Car Deep Learning#汽车自动驾驶
⑤ 慕课相关网址:
https://www.icourse163.org/learn/SEU-1207599802?tid=1207961201#/learn/content
https://www.icourse163.org/learn/BIT-1207432808?tid=1461856456#/learn/content
https://www.icourse163.org/learn/UJS-1464319164?tid=1465182445#/learn/content
⑥ 人工智能与自动驾驶
https://www.bilibili.com/video/BV1g5411h7GV/?spm_id_from=333.788.top_right_bar_window_custom_collection.content.click&vd_source=601090a9f64d67179e565bdf3fd634fc
3、学校网络资源:
http://pt.csust.edu.cn/meol/jpk/course/blended_module/index.jsp?courseId=46281
4、课程思政资源:
① 钱磐华——中国自动驾驶的发展
https://baijiahao.baidu.com/s?id=1774599812858929328&wfr=spider&for=pc
② 自动驾驶深度之三:自动驾驶发展现状、竞争格局及资本分析
https://baijiahao.baidu.com/s?id=1770909522305651615&wfr=spider&for=pc
③ 汽车全自动驾驶面临的4大挑战
https://zhuanlan.zhihu.com/p/499623982
十、教材、主要参考书(一本主教材、三本参考书)
教材:
[1] 崔胜民,智能网联汽车环境感知技术[M],人民邮电出版社,2020.
主要参考书:
[2] 崔胜民等,智能网联汽车先进驾驶辅助系统关键技术[M],化学工业出版社,2019;
[3] 李力等,智能汽车:先进传感与控制[M],机械工业出版社,2016;
[4] 陈宁等,智能网联汽车环境感知技术[M],机械工业出版社,2021;
[5] 伊恩.古德费络[美]等,深度学习[M],人民邮电出版社;
[6] 王建等编,自动驾驶技术概论[M], 清华大学出版社,2019;
[7] 陈慧岩等编,无人驾驶汽车概论[M],北京理工大学出版社,2014;
[8] 郭烈等编,汽车安全辅助驾驶技术[M],北京大学出版社,2014;
[9] 泉田良辅[日]著,智能化未来 无人驾驶将如何改变我们的生活[M],李晨译,浙江大学出版社,2015;
[10] 申泽邦等著,无人驾驶原理与实践[M],机械工业出版社,2019;
[11] 胡迪·利普森[美]等,无人驾驶[M],文汇出版社,2017;
[12] 甄先通等著,自动驾驶汽车环境感知[M],清华大学出版社,2020;
大纲执笔人:廖家才 课程负责人:廖家才 大纲审核人:胡林